Sparse sensor and actuator selection in cyberphysical networks
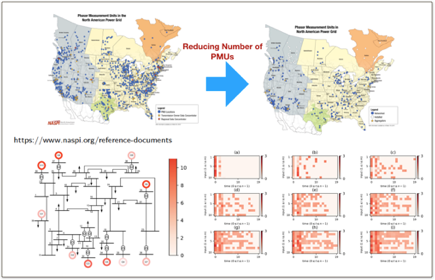
In many large-scale networked systems, such as in infrastructure networks (e.g., water and power networks) to multi-robot systems and the study of the human connectome, it is increasingly important to be able to estimate the state of the overall system or to control the system using a small subset of available features (e.g., PMUs, camera sensors, EEG sensors, data from 3-D mapping and radar technology). When the dimension of the state is large, finding the optimal yet low cardinality subset of features is like finding a needle in a haystack: the problem is computationally difficult and provably NP-hard. Previous studies have been mainly focused on solving the optimal feature selection problem using the greedy heuristic, as approximations of the corresponding sparse-subset selection problem. While these results attempt to find approximation algorithms for finding the best sparse subset, our focus is to gain new fundamental insights into approximating various performance metrics compared to the case when all features are chosen. We adopt the machinery of sparsification in the theoretical computer science literature to find a sparse-subset of actuators/sensors to improve the controllability/ observability performance. We also develop a framework to design a sparse actuator/sensor schedule and show that by carefully designing a time-varying feature selection strategy, one can choose on average a constant number of relevant actuators/sensors at each time, to ensure proper control/monitoring of a linear dynamical system.
More info:
- M. Siami, A. Olshevski, A. Jadbabaie. Deterministic and Randomized Actuator Scheduling With Guaranteed Performance Bounds. IEEE Transactions on Automatic Control (TAC), under review.arXiv:1805.00606
- V. Tzoumas, M. A. Rahimian, G. J. Pappas, A. Jadbabaie. Minimal Actuator Placement with Bounds on Control Effort. IEEE Transactions on Control of Network Systems (TCNS), Vol. 3, No. 1, 2016. (correction)
- A. Jadbabaie, A. Olshevsky, G. J. Pappas, V. Tzoumas. Minimal Reachability is Hard to Approximate. IEEE Transactions on Automatic Control (TAC), to appear February 2019.
- V. Tzoumas, L. Carlone, G. J. Pappas, A. Jadbabaie. LQG Control and Sensing Co-Design, arXiv:1802.08376
- V. Tzoumas, A. Jadbabaie, G. J. Pappas. Resilient Non-Submodular Maximization over Matroid Constraints